次世代ロボティック・移動搭載IoT技術の研究開発・対外供給(Robotic and Mobile IoT Technologies)

ImPACT「タフ・ロボティクス・チャレンジ」プログラムへの取組と成果 (Research and development in ImPACT Tough Robotics Challenge Program)
プログラム概要
内閣府「革新的研究開発推進プログラム (ImPACT)」の「タフ・ロボティクス・チャレンジ (Tough Robotics Challenge; TRC)」研究開発プログラムは、事故や災害の軽減化(人命救助・復旧等)活動に際し人間作業の代替や迅速化・効率化のために、情報収集等災害対応の切り札として「タフでへこたれない」ロボットの実現を目指したものである。災害環境と対応ミッションの想定の下、5種類のロボットを対象に、研究開発のベースとなる「ロボットプラットフォーム」(RPF) が技術課題とともにプログラムから提供され、それへ追加・統合する形で技術コンポーネント及びシステムソリューションの研究開発が進められた。
研究開発内容
ASTEM研究開発本部では、被災家屋内などの狭い瓦礫空間内部の調査や要救助者発見等情報収集活動を支援するものとして、本プログラムの細径(直径50mm程度の)索状ロボットプラットフォームと技術課題への委託研究公募に対し提案を行ない、2015(平成27)年9月より研究開発を開始した。細索状のプラットフォームロボットで提起された①索状体の駆動原理と柔軟さに制約された遠隔操作性能や運動性能などの「移動能力」及び②映像や音声、環境などの情報が複合的に収集できる「探索能力」の技術課題解決・能力拡大へは、移動機構・センシング/デバイス・情報通信処理・制御技術コンポーネント・システムソリューションの研究開発を行なった。以下、その主な成果を示す。(*)
(*) 各項目サブページに動画多数掲載あり / Find more and video clips in the following subpages.
➧ ハードウェア技術コンポーネント (Hardware technology components; HTC)![]()
➧ ソフトウェア技術コンポーネント (Software technology components; STC)![]()
技術成果・知見の対外供給・利用促進 (Sharing and application of the obtained results and knowledge)
カスタマイズ開発相談・システム提案例
ImPACT-TRC研究開発による細径・小型ロボティック機構・移動搭載IoT関連コンポーネントやシステム技術の成果及び知見を用いたカスタマイズ開発相談・システム提案例:
✧ 事故原子炉建屋内用調査ロボット
✧ 日本家屋床下害虫防除用調査ロボット
✧ ガスタービン内検査用内視鏡マニピュレータ
✧ 商業ビル内排水管内検査用ロボット
技術成果・知見の対外供給・更なる利用促進
今後は事故や災害時に限定されず産業や社会インフラに活用され技術の循環・活性化が図れるよう努めていく。
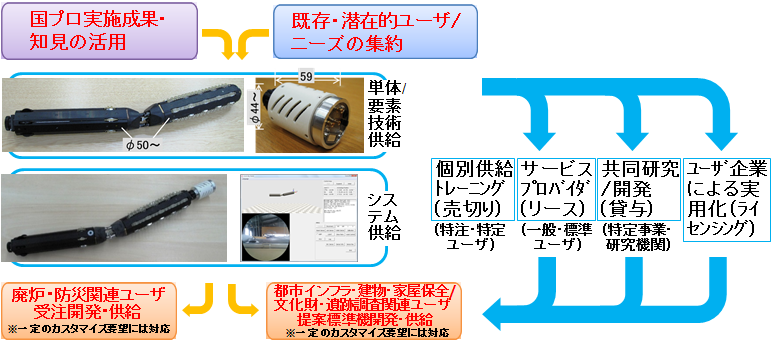
以下の活動への支援要請に応えるツール・システムとしての利用例も想定している:
✧ 非常 (災害/事故) 時の高度救助資機材としてヒトとの捜索・救助の協働
✧ 埋蔵文化財・遺跡発掘調査時の内部非破壊探査など
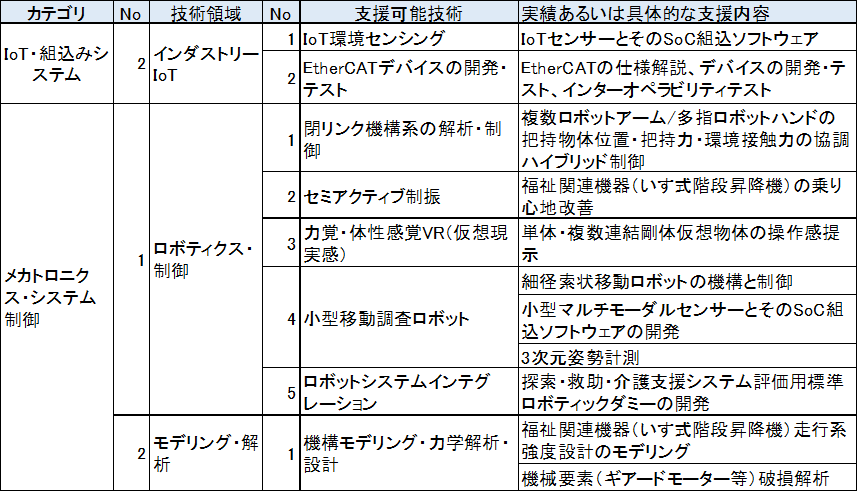
IIoT・メカトロニクス・システム制御技術支援メニュー (Technical deliverables in IIoT, mechatronics, and system control areas)
関連発表/参考文献一覧 (References)
[1] 鄭心知,陳衛東,王賀昇,江茂奎,高森年.索状能動探索システムの提案 ―機構・運動学・計測制御―.計測自動制御学会論文集, Vol.49, No.1, pp.142–148, 2013 / Xin-Zhi Zheng, Weidong Chen, Hesheng Wang, Maokui Jiang, and Toshi Takamori. A Proposal for an Active Cord-Like Searching System —Mechanisms, Kinematics, Sensing, and Control—. Transactions SICE (in Japanese).
[2] Xin-Zhi Zheng, Hesheng Wang, Weidong Chen, and Toshi Takamori. CordView: A Cord-Like Vehicle System for Search and Inspection of Environmental Workspace —A Prototype—. Proc. IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.1950–1955, 2015.
[3] 鄭心知,渡部進一.TRCにおける細径索状ロボットの移動・探索技術課題解決(第1報) ―進入操縦・環境検知可能な索状先端能動機構技術の概要―.日本機械学会ロボティクス・メカトロニクス講演会, 1P1-09a7, 2016 / Xin-Zhi Zheng and Shinichi Watanabe. Toward Solution to Challenges of Mobility and Search Ability of Fine-Diameter Cord-Like Robots in TRC Program (Part 1) —A Technology Brief of a Cord-Like Leading Active Mechanism Capable of Motion Maneuvering and Environment Detection—. ROBOMECH2016 (in Japanese).
[4] 鄭心知,渡部進一.TRCにおける細径索状ロボットの移動・探索技術課題解決(第2報) ―先端能動機構とロボットプラットフォームとの統合―.第17 回計測自動制御学会システムインテグレーション部門講演会, 1H3-5, 700/703, 2016 / Xin-Zhi Zheng and Shinichi Watanabe. Toward Solution to Challenges of Mobility and Search Ability of Fine-Diameter Cord-Like Robots in TRC Program (Part 2) —Integration of Leading Active Mechanism with Robot Platform—. SICE SI2016 (in Japanese).
[5] 鄭心知.細径索状ロボットの移動・探索に向けた技術開発 ―機構・情報基盤技術と実装―.第1回ロボデックス ―ロボット開発・活用展―,産学連携ロボットフォーラムセミナー, 2017 / Xin-Zhi Zheng. Seminar lecture for Robot Forum for Industry-Academia collaboration, 1st RoboDEX: Robot Development & Application EXPO (in Japanese).
[6] 鄭心知,渡部進一.TRCにおける細径索状ロボットの移動・探索技術課題解決(第3報) ―操作支援インターフェースの構築・評価―.日本機械学会ロボティクス・メカトロニクス講演会, 1P2-P09, 2017 / Xin-Zhi Zheng and Shinichi Watanabe. Toward Solution to Challenges of Mobility and Search Ability of Fine-Diameter Cord-Like Robots in TRC Program (Part 3) —Development and Evaluation of Operational Assistance Interface—. ROBOMECH2017 (in Japanese).
[7] 鄭心知,渡部進一.TRCにおける細径索状ロボットの移動・探索技術課題解決(第4報) ―映像・操作スタビライザーによる移動操縦支援とその評価―.第35回日本ロボット学会学術講演会, 1K1-04, 2017. [講演稿PDFリンクはRSJメンバーログイン済時にのみ有効] / Xin-Zhi Zheng and Shinichi Watanabe. Toward Solution to Challenges of Mobility and Search Ability of Fine-Diameter Cord-Like Robots in TRC Program (Part 4) —Operational Assistance Using Image/Maneuvering Stabilizer and Its Performance Evaluation—. RSJ2017 (in Japanese). [Notice: Paper’s PDF link valid for logged-in RSJ members only.]
[8] 鄭心知,渡部進一,鈴木陽介.TRC における細径索状ロボットの移動・探索技術課題解決(第5報) ―側面近接覚環境検知およびそのタフな測距・通信系構築―.日本機械学会ロボティクス・メカトロニクス講演会, 2A1-L03, 2018 / Xin-Zhi Zheng, Shinichi Watanabe, and Yosuke Suzuki. Toward Solution to Challenges of Mobility and Search Ability of Fine-Diameter Cord-Like Robots in TRC Program (Part 5) —Lateral Environmental Detection Based on Proximity Sensing and Its Tough Ranging/Communication System—. ROBOMECH2018 (in Japanese).
[9] Xin-Zhi Zheng and Shinichi Watanabe. CordVIEW II: A New Fine-Diameter Cord-Like Vehicle System for Search and Inspection in Exploring Workspace, Mark II —Basic Functional Segments, Integration, and Image/Maneuvering Stabilizer—. Proc. IEEE International Conference on Information and Automation (ICIA), pp. 385–390, 2018.
[a] ImPACT「タフ・ロボティクス・チャレンジ」技術カタログ2018.11版 / ImPACT “Tough Robotics Challenge” Technology Brochure, 2018.11 Ed. (in Japanese).
[b] Xin-Zhi Zheng, Shinichi Watanabe, and Yosuke Suzuki. CordVIEW II: A Fine-Diameter Cord-Like Vehicle System for Search and Inspection in Exploring Workspace, Mark II —A Prototype with Segmental Structure, Kinematics, and Operational Assistance. Submitted to Advanced Robotics (under review), 2019.
[c] 能動連結機構及びその位置姿勢の検出方法及びその制御方法.特-4413251, 2009.10 (特願2007-196835) / Active Joint Mechanism and the Measurement and Control of Its Position/Orientation. JP Patent P4413251 (in Japanese).
(*) 発表/文献の原稿は「お問合せ先」まで / For original manuscript of the References, inquire at Contact.
お問合せ先 / Contact
Phone: 075-315-8652 / Fax: 075-325-3024 / E-mail: rd-robotic-mobile-iot|at|astem.or.jp
(更新 / Last updated: Nov. 5, 2019)
一覧に戻る ページTOP