ハードウェア技術コンポーネント (Hardware technology components; HTC)
「先端能動機構 (Leading Active Mechanism; LAM)」の開発。単独でも小型移動ロボットとして機能し、次の構成を有する。
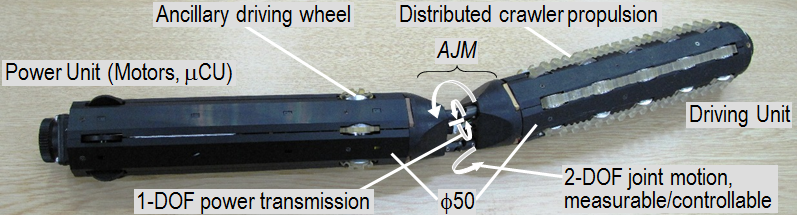
HTC1) 索状移動ロボット (Cord-like mobile robot)「能動セグメント (Active Segment; ASG)」:2自由度能動関節屈曲 (Active Joint Mechanism; AJM。特-4413251)・その可検出・可制御性による測位・操舵制御、分布型駆動による無停止移動推進、及び登坂・段差乗上げ・溝乗越え能力を有する。質量1.2kg。
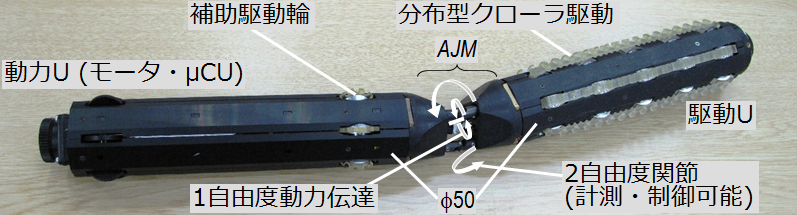
索状移動ロボット / The cord-like mobile robot (ASG)
{kind=link}
関連発表/参考文献 (References)
✧ 計測自動制御学会SI部門講演会 (SI2016), 1H3-5, 700/703, 2016.
✧ Proc. IEEE ICIA 2018, 385/390, 2018.
✧ ImPACT-TRC技術カタログ / Technology Brochure, 2018.11版.
✧ Submission to Advanced Robotics (under review), 2019.
関連動画 / Video clips
▶ 段差・溝越え・登坂 / Step, trench, and rampway 🎦
▶ 前進後退・小回り転回・複合坂 / Back and forth, small radius turn, and crossing ramp 🎦
▶ プロジェクト評価会デモ / Demo at project field evaluation on mobility 🎦
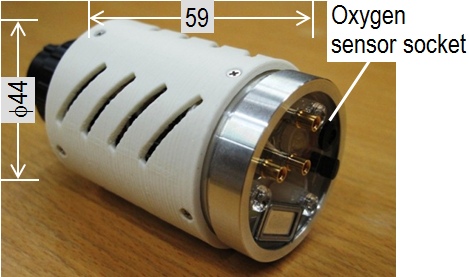
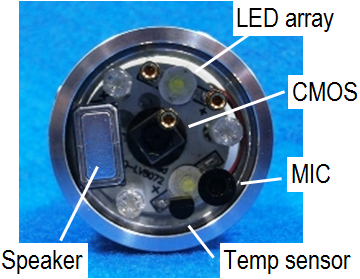
HTC2) 前方マルチモーダル探索センサユニット (Multimodal Search Sensor Unit; MMSS):44mm径、内蔵SoCを含むマルチモジュール構成によるセンサデータ集約・LAN伝送、映像ストリーミング、双方向対話、3D姿勢、環境情報などの検知機能を構成できる。

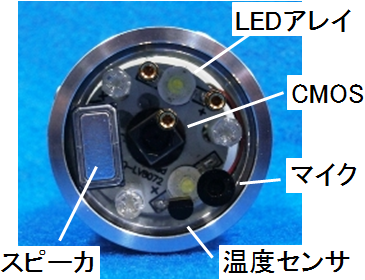
マルチモーダル探索センサユニット / The Multimodal Search Sensor Unit (MMSS) (Pic 1 | Pic 2)
{kind=link}
{kind=link}
関連発表/参考文献 (References)
✧ 計測自動制御学会SI部門講演会 (SI2016), 1H3-5, 700/703, 2016.
✧ IEEE ICIA 2018, 385/390, 2018.
✧ ImPACT-TRC技術カタログ / Technology Brochure, 2018.11版.
✧ Submission to Advanced Robotics (under review), 2019.
関連動画 / Video clips
▶ プロジェクト評価会デモ / Demo at project field evaluation on multimodal sensing 🎦
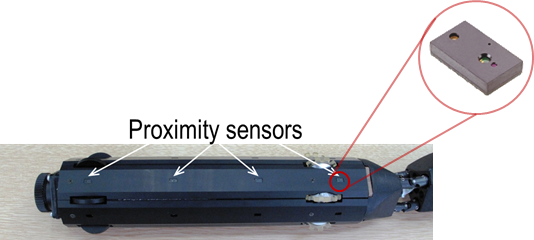
HTC3) 側面近接覚環境検知モジュール (Lateral Proximity Sensing/Environment Detection Module; LEDM/LPSM):LAM機体側面への小型赤外レーザ素子の組込みにより、全周6側面24点にて機体表面~100mm (一部実績値として、表面~200mm) 範囲の距離計測能力を有する。
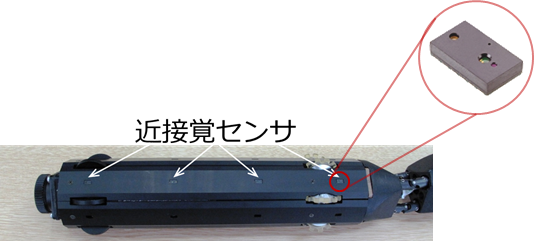
側面近接覚環境検知モジュール / The Lateral Proximity Sensing/Environment Detection Module (LEDM/LPSM)
{kind=link}
LEDM/LPSMは前方MMSS映像への補完・操作支援などのための環境情報を取得することを目的とする。
関連発表/参考文献 (References)
✧ 日本機械学会ロボメカ部門講演会 (ROBOMECH2018), 2A1-L03, 2018.
✧ ImPACT-TRC技術カタログ / Technology Brochure, 2018.11版.
✧ Submission to Advanced Robotics (under review), 2019.